ちなみに「HeartToHeart ver3」とは KHR-1HV を買うと添付されているソフトでロボットを制御します。まぁそれと同等のマック版を目指す訳です。(出来るのかなぁ?)
現状は相手の RCB-3HV との通信は出来ている様です。ただ、先日取得出来たバージョン情報が取得出来なくなっているので、問題はまだ有りそうです。1個のサーボを動かす所まで来ました。ジージーとプログラムのスライダーを動かすとサーボも動きます。サーボに送る値(回転値)が良く分からないんです。コマンドリファレンスには値の範囲として 0~32767 プログラム上では -16383 ~ 16384 と表すみたいなんですが操作説明書では「1パラメータに付き 0.35度」と有ります。しかし 100 くらい変位すると結構動きます。KHR-1HV のサーバは 180度の範囲で動作する様なので 180/0.35 で約 514 となり+1 で 256 程度のはずです。マニュアルに他にも 「サーボ表示数値」「サーボ実働数値」は違う、とか書かれているのですが、何の事やら?
まぁ先に Windows でいじくりたおさないと理解出来なさそうです。操作説明書に書かれている単語とコマンドリファレンスに書かれている単語の相違も有りそうだし。Windows で設定した値が実際にはどのパラメータに対応するのか一つずつ確認する必要が有りそうです。はぁ
まだまだ先は長そうです。
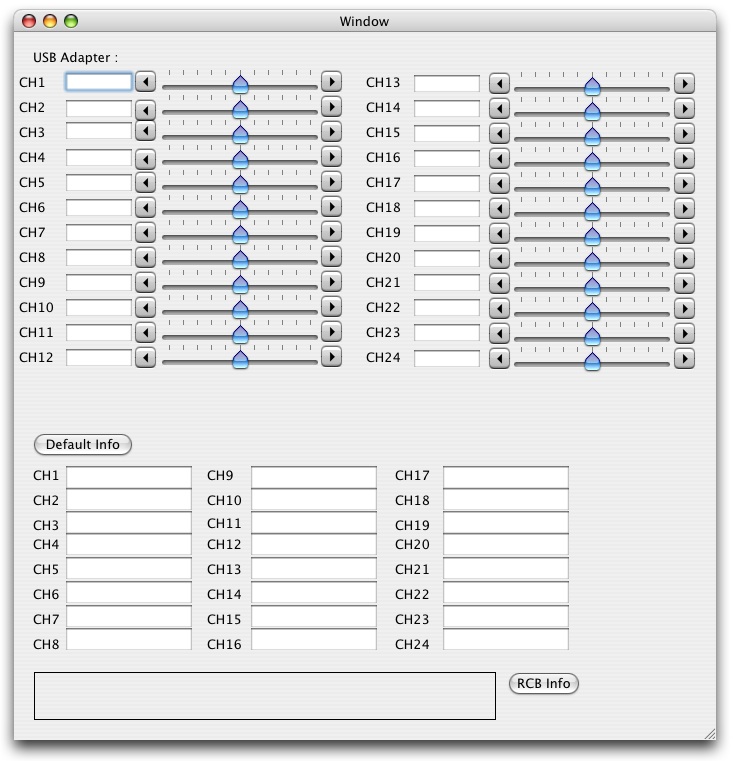
テスト中と言うか確認プログラムの画面です